 |

Submitted by , posted on 06 January 2003
|
 |
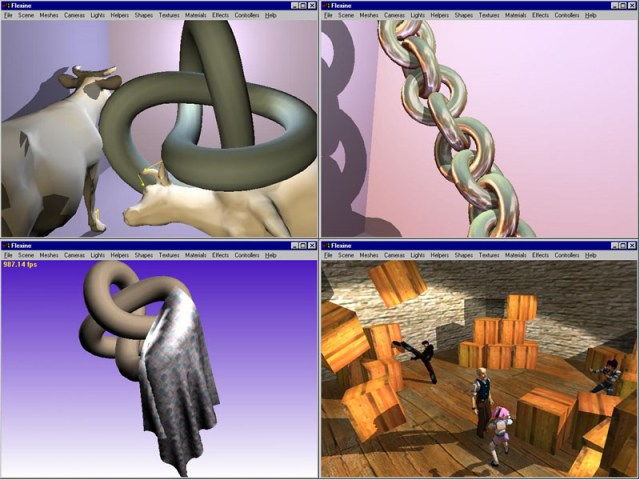
Image Description, by

Time for some physics ! Here are some new screenshots of my physics
engine.
Up-left & Up-right:
My rigid body simulator previously only worked with basic primitives
like spheres or cubes, as shown in this past IOTD
Now it directly supports arbitrary (non-convex) meshes. You can download a little demo here:
http://www.codercorner.com/MeshMesh.zip
The demo only contains a single scene so far, with a cow and a knot.
In the second screenshot each torus is handled as an arbitrary mesh to simulate a swinging chain. This is a bit overkill: point-to-point constaints would be more efficient here! Nonetheless it works well.
The main page for my physics stuff is here:
http://www.codercorner.com/Rigid.htm
Bottom-left:
Here you can see improved cloth-mesh collision. In my last simulator collisions were only working between cloth and spheres. I've improved it a bit and now the cloth patch collides with any meshes. Also, I've moved to Verlet integration since last time.
Bottom-right:
You might remember my favorite week-end project from my last
IOTD;
The main page for this "Konoko Payne" project is here:
http://www.codercorner.com/Oni.htm
I'm currently working on a very interesting part : blending physics and standard character control. Traditionally your main character uses a lot of canned animations (Oni certainly used a *lot* of them), and a state machine drives the whole thing. Interactions with the world are often limited, if not completely scripted. Using a physics engine to model those interactions offers a lot of extra freedom, but the actual transitions from "canned" to "physically-driven" are often very tricky to do.
In this first test, canned animations are used for pick & punch motions, and crates are physically-driven :
http://www.codercorner.com/KonokoBoxTest.zip
Here's a nice article starting to investigate the troubles arising
when linking character control and physics:
http://www.gamasutra.com/features/20020816/maclaurin_01.htm
Cheers,
Pierre
http://www.codercorner.com
|
|